TCR Users Manual
V2.2
Introduction
TCR are solar powered radar object counters with integrated LoRaWAN® connectivity.
The system includes powerful radar signal processing that enables bi-directional counting of moving objects in distances up to 10m. Objects can be categorized into up to 4 groups with speed and object size filters. Counter values are transmitted in regular intervals to the LNS (LoRaWAN® Network Server).
TCR GEN2 is a very versatile radar counting system. It enables various applications such as people counting, traffic statistics, use of sports facilities or even security applications.
TCR-Sxx types come with an integrated solar charging unit including tempered battery. The battery is used to backup up to 4 foggy days. The system can be installed very flexible on different locations including remote areas without any electricity.
Installation
To achieve the most accurate measurement possible, planning the installation is essential. This chapter therefore contains information on the correct choice of location for the TCR traffic counter.
To achieve the most accurate measurement possible, planning the installation is essential.
Horizontal or Top Down?
The devices can be operated both directly next to the road or elevated and looking down from above. We recommend using a laser measuring tool or a laser pointer to align the device correctly.
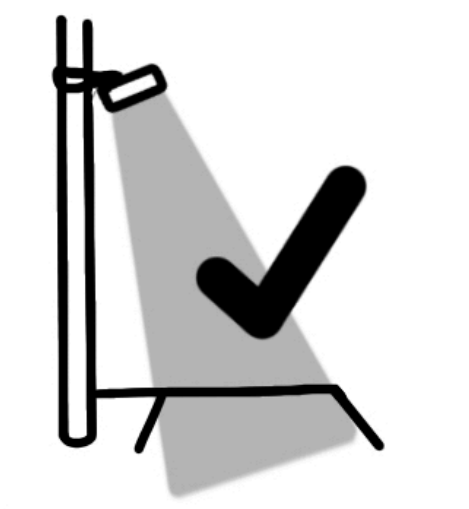 |
When mounted on a pole or mast you should point the sensor to the middle of the road (center line). This can be done easily by adjusting the tiltable bracket MT80-15. The bracket can be placed about 3-4 meters above ground. Please check the max range of the sensor. Important: The pole must not move in the wind |
 |
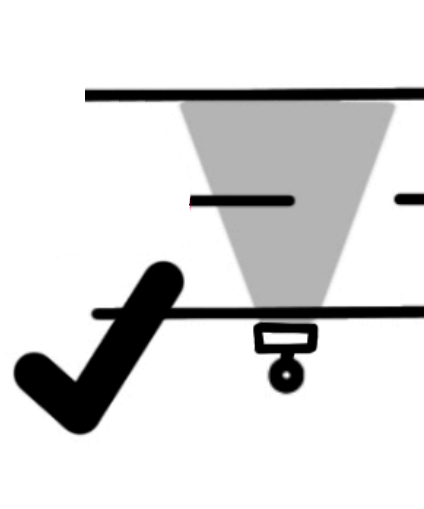
When mounted next to the street we recommend a mounting height of 1.2-1.5m above ground. Line of sight should be completely horizontal. |
Important Rules
The device works best when the following rules are observed.
 |
Lateral to movement TCR are side radars that detect motion from both directions simultaneously. The movement should be linear. Therefore place the sensor parallel to the movements direction and keep away from curves, crossings, driveways |
 |
Distance to object LS-Devices: The sensor must be placed at least 50cm away from the target. HS-Devices: The sensor must be placed at least 3m away from the target. |
 |
Avoid obstacles in FOV Make sure there are no obstacles such as walls, street signs, shrubberies, trees in the field of view. When placed beside water the device might detect the waves. |
LTR vs RTL

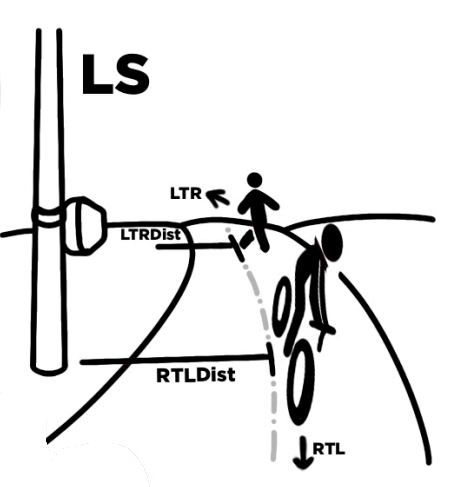
The TCR traffic counters distinguish between 2 directions.
- RTL = objects which come from the right and disappear to the left. The left LED will pulse once in this case.
- LTR = objects which come from the left and disappear to the right. The right LED will pulse once in this case.
Measure distance to lanes
In order for the device to determine the velocities, the distance to the object must be known. The distance can be determined with a tape measure or a laser distance meter. Measurements are taken from the middle of a track to the front of the device.
- RTLDist = Distance in cm to the RTL movement line.
- LTRDist = Distance in cm to the LTR movement line.
| Situation | |
|---|---|
 |
Two lanes, cross traffic (2L2D) This is typical for HS applications such as measuring traffic on interstate roads. RTLDist and LTRDist are different. |
 |
Cross traffic on one lane (1L2D) This is typical for low speed traffic (LS) measuring bicycle lanes or small paths. In this case get the distance to the center of the track and set RTLDist and LTR Dist to the same value. |
Device Settings
TCR traffic counters must be configured correctly to obtain good results. This chapter therefore describes all settings individually.
For most applications only the following settings needs to be changed:
- LTRDist to set the distance to movement from the left
- RTLDist to set the distance to movement from the right
- RadarSens to set the radar sensitivity level (comparable with the the shutter on a photo camera)
Configuration is via a USB cable, connected to the CONFIG port and using the PPX Setup Tool (recommended) or alternatively via the command line interface CLI.
Note: On first generation TCR units (TCR-LS, TCR-LSS, TCR-HS, TCR-HSS), the configuration port is located on the main board. To connect the USB cable, the unit must be opened.
Symbols used
- Setting can be changed over USB with the PPX Setup Tool
- Setting can be changed over USB using the TCR Command Line Interface
- Setting can be changed remotely by sending TCR LoRaWAN Config Downlink Commands
Application Settings
Operation Mode
You can select different types of uplink behaviour using the Operation Mode setting.
| Mode | Description | Applications |
|---|---|---|
| Timespan | The device will accumulate vehicles or people counting over a certain time. Then the counter values will be transmitted over the LoRaWAN Network. Time period is defined by the LoRaWAN Uplink Interval Setting. | Most Applications use this mode |
| NotZero | Same as Timespan Mode, but the uplinks will be skipped if there is no count during the Uplink Interval Period. The setting can be used to reduce uplinks for LoRaWAN networks with limited number of allowed uplinks/downlinks per day. As the radar is the largest contributor to energy consumption, this setting will not have a noticeable energy saving effect. | Reducing uplinks |
| Trigger | Sends an uplink immediately when an object is detected. Unfortunately, the LoRaWAN standard does not allow uplinks to be sent in succession at any speed. Instead, the duty cycle must be observed. This also applies to this mode. This means that a trigger is only executed immediately if there was a sufficiently long waiting time without counts beforehand (something like 3 minutes). | Train detection Security Applications |
Hold-Off
The hold-off function has been introduced to the device firmware to be able to count connected vehicles (trains, trailers) as one instead of multiple counts.
Hold-off is enabled by entering a value bigger than zero.
As an example: If Hold-off time is set to 10 seconds the device will increase the counters as soon as an object has been detected. Then the radar will be off for 10s .
Value range: 1-600s (0 = disabled).
Default: 0
Auto-Zero
The Auto-zero Timeout will set the account to zero after this time has elapsed. This is useful if you are using confirmed uplinks. If the uplinks fail, the counter will be reset to zero after this time.
Default: 120min
Totalizer
This setting defines how to increment the counter values.
| Totalizer | Counter | Reset |
|---|---|---|
| Disabled | Counter values represent object counts during the last time period | After a LoRaWAN Uplink ACK is received the counter values are cleared. |
| Enabled | Counter values start with 0 and go up to 65535 max. | Reset counters with a LoRaWAN Downlink Command |
Default: Disabled
Fallback Category
We try to measure object size and speed. In some situations, however, it is not possible to determine the size and speed in addition to the direction of movement. This is mainly if the object is too fast or covers the field of view (FOW). In this cases, no classification into categories is made and instead the counter of the fallback category is increased.
Try to place the sensor a little further away from the object so that the objects fits into the FOW.
Traffic Categories
Criteria defining each type of detection. The radar determines the category based on the speed and size of the object.
Low Speed device: You can only select two categories (People and Two-Wheelers)
High Speed device: You can select all 4 categories (People, Two-Wheelers, Cars, HGV)
Important: These settings will need to be changed depending on where the radar is installed, what you are trying to detect and the type of vehicles likely to pass underneath.
Radar Settings
Radar Enabled
Radar on by default
Channels
These are slightly different radar frequencies so that identical units cannot interfere with each other.
1 set by default
2 if you have a radar in the same
Sensitivity
After entering LTRDist and RTLDist the sensitivity is automatically determined based on those values. The further the distance to the measurement, the higher the sensitivity.
Note: Small adjustments of sensitivity can be done manually. If the ratio (sensitivity vs. RTL/LTR) is not correct, the radar may incorrectly categorize the measured object.
Beam Angle
Physically, the radar has a width of approx. 80° or +/-40 on each side. With the Beam Angle, you can narrow the range. With this, the algorithm starts to ignore movements on the sides - so it is more focused. The disadvantage of this is that the speed range decreases because the algorithm detects the object later. (like blinkers on a horse, which is more likely to be frightened).
Beam Directions
Can be offset by up to 30 degrees in any direction. Once again cater for things link tree and things in the way.
LTRDist
Distance between the radar surface and the object you are trying to detect approaching from the left.
LTRDist
Distance between the radar surface and the object you are trying to detect approaching from the right.
Note: If you get inaccurate measurement data, check the accuracy of the distance settings .
see more instruction: Measure distance to lanes
Autotune
Turn on autotune to allow the radar to adjust the sensitivity.
If the sensitivity is to high, the object might blur and therefore gets too big (Size value) If the distance is incorrect the size get too big too.
With Autotune enabled the Radar Sensitivity will be controlled automatically. It’s comparable to the automatic exposure setting at a photo camera.
LoRaWAN Settings
LoRa Modem Enabled
LoRa Modem on by default
Uplink Interval (10min)
Time span of the counts that are sent
Device Class
Class A Device:
Class B Device:
Class C Device:
Confirmed Uplinks
ON:
OFF:
Defaults: Unconfirmed uplinks (use LinkChecks!)
ADR Enabled
ON:
OFF:
RTC Timesync Enabled
ON:
OFF:
Link Check Interval
After 12 hours (720 mins) the device will send a LinkCheckReq (MAC command) together with the next uplink. If there is no LinkCheckAns from the LNS there might be a network outage and the device will start a new Join procedure.
LinkCheck can be disable by setting the value to 0.
TTN Users: Please be aware that there will be a downlink used to answer the LinkCheckReq.
Operation Mode (mode)
TCR can be operated in 3 different modes.
| Mode | Description | Used for |
|---|---|---|
| Timespan | Device is counting during a certain time interval (see lora_interval setting). After the time is up, counter values are transmitted. | Default behavior. This can be used for creating histograms or controlling actors like street lights. |
| NotZero | Same as Timespan but uplinks are blocked as long as there is no movement. | This can be used to save uplinks or energy. |
| Trigger | This will send an uplink as soon as an object has been detected | This can be used for alam applications. |
Note: Trigger mode is limited by the LoRaWAN® standard. It is not possible to transfer as many times and in arbitrarily short intervals. (See ETSI Duty Cycle for more information)
Hold-Off Timer (holdoff)
This function is used to filter fast consecutive counts.
As an example, if Hold-off time is set to 10 seconds, no second count will occur for 10s after a first count.
This function is useful in situation where you want to count a queue of objects e.g. count the train and not the waggons.
Value range: 1-600s (0 = no filter applied)
The Hold-off timer setting can also be changed via a LoRaWAN® Config Downlink.
Defaults Settings
Following table shows factory defaults for two possible speeclass configurations LS and HS.
| Setting | TCR-xxx/LS | TCR-xxx/HS |
|---|---|---|
| mode | 0 | 0 |
| sumup | 0 | 0 |
| holdoff | 0 | 0 |
| timeout | 120 | 120 |
| fallbackcat | 1 (A) | 2 (B) |
| cat_p_enabled | 1 | 0 |
| cat_p_minspeed | 1 | 1 |
| cat_p_maxspeed | 7 | 7 |
| cat_p_minsize | 1 | 1 |
| cat_p_maxsize | 100 | 100 |
| cat_a_enabled | 1 | 1 |
| cat_a_minspeed | 5 | 5 |
| cat_a_maxspeed | 40 | 40 |
| cat_a_minsize | 100 | 100 |
| cat_a_maxsize | 250 | 250 |
| cat_b_enabled | 0 | 1 |
| cat_b_minspeed | 10 | 10 |
| cat_b_maxspeed | 100 | 100 |
| cat_b_minsize | 250 | 250 |
| cat_b_maxsize | 600 | 600 |
| cat_c_enabled | 0 | 1 |
| cat_c_minspeed | 10 | 10 |
| cat_c_maxspeed | 80 | 80 |
| cat_c_minsize | 600 | 600 |
| cat_c_maxsize | 1000 | 1000 |
| lora_enabled | 1 | 1 |
| lora_class | 0 (A) | 0 |
| lora_confirmed | 0 | 0 |
| lora_adr | 1 | 1 |
| lora_fsb | 0 | 0 |
| lora_interval | 10 | 10 |
| lora_lci | 720 | 720 |
| lora_ula | 10 | 10 |
| lora_timesync | 1 | 1 |
| radar_enabled | 1 | 1 |
| radar_channel | 0 | 0 |
| radar_sens | 90 | 95 |
| radar_beam | 80 | 80 |
| radar_dir | 0 | 0 |
| radar_ltrdist | 250 | 800 |
| radar_rtldist | 250 | 400 |
| radar_autotune | 1 | 1 |
Device Type
Usually device profiles are saved once during the production of the devices. E.g. TCR-DLI/LS/EU868
However starting with TCR GEN2 and Firmware V2.1, both the Speed Class as well as the LoRaWAN® Region may be changed by the user too.
This allows to stock standard types (TCR-DLI, TCR-DLE, TCR-SLI, TCR-SLE) and configure it later according to customers need.
Note: Device profiles can only be changed via the command line interface. Changes will be stored in a secure element (a separate chip on the mainboard) and will not be overwritten by Firmware Updates.
Speed Class
Speed classes are used to better adapt the radar algorithm to the objects to be measured.
-
Speed class 0 (people) is used for pedestrians only.
-
Speed class 1 (low speed) is used for pedestrians and bicycles or very slow-moving cars in parking areas. The typical range is about 1 to 40 km/h
-
Speed class 2 (high speed) goes up to 120km/h. However, slow objects (< 10km/h) such as pedestrians can no longer be detected reliably.
The boundaries are not absolute like nothing in this world is absolutely deterministic. Changing radar scanning frequencies shift the detection characteristic.
Important: An incorrectly selected speed class can strongly influence the measurement results.
In order to change the speed class of your device use the following command sequence in the CLI.
Set to low speed (LS)
set speedclass 1
1
set defaults
ok
save
ok
Set to high speed (HS)
set speedclass 2
1
set defaults
ok
save
ok
People counting only (P)
set speedclass 0
0
set defaults
ok
save
ok
Check devicetype
get typestr
This should return the device's SKU, TCR-xxx/LS/xxxxx or TCR-xxx/HS/xxxxx
LoRaWAN® Region
The integrated LoRaWAN® modem in TCR GEN2 devices can be adapted to LoRaWAN® frequency plans used in different regions. A complete list of countries can be found in the LoRaWAN® 1.0.3 Regional Parameters Document.
Important: TCR-DLI and TCR-SLI use wide band 868MHz/915MHz internal antennas that can match all supported regions. For devices with external antennas, please check the frequency range of the antennas.
EU868
Enable frequency plan EU863-870 used in most European countries and parts of Africa.
lora set region 1
1
save
ok
get typestr
TCR-xxx/xx/EU868
AS923
Enable channel plan AS920-923 (sometimes called “AS1”) used mostly in Japan, Malaysia, Singapore and sometimes Australia.
lora set region 2
1
save
ok
get typestr
TCR-xxx/xx/AS923
AU915
Enable channel plan AU915-928 used mostly in Australia and New Zealand
lora set region 3
1
save
ok
get typestr
TCR-xxx/xx/AU915
Please also set the frequency sub-band for AU915 as few LoRaWAN® gateways do support more than 8 channels.
lora set fsb [x]
| Subband | Channels | CLI Command |
|---|---|---|
| 0 | 0-63 (all) | lora set fsb 0 |
| 1 | 0-7 | lora set fsb 1 |
| 2 | 8-15 | lora set fsb 2 |
| 3 | 16-23 | lora set fsb 3 |
| 4 | 24-31 | lora set fsb 4 |
| 5 | 32-39 | lora set fsb 5 |
| 6 | 40-47 | lora set fsb 6 |
| 7 | 48-55 | lora set fsb 7 |
| 8 | 56-63 | lora set fsb 8 |
US915 (Experimental)
Enable channel plan US902-928 used mostly in USA, Canada and South America.
Note: The device does support the US915 frequency plans. However, FCC/IP certification is still pending.
lora set region 4
1
save
ok
get typestr
TCR-xxx/xx/US915
Please also set the frequency sub-band for AU915 as few LoRaWAN® gateways do support more than 8 channels.
lora set fsb [x]
| Subband | Channels | CLI Command |
|---|---|---|
| 0 | 0-63 (all) | lora set fsb 0 |
| 1 | 0-7 | lora set fsb 1 |
| 2 | 8-15 | lora set fsb 2 |
| 3 | 16-23 | lora set fsb 3 |
| 4 | 24-31 | lora set fsb 4 |
| 5 | 32-39 | lora set fsb 5 |
| 6 | 40-47 | lora set fsb 6 |
| 7 | 48-55 | lora set fsb 7 |
| 8 | 56-63 | lora set fsb 8 |
IN865 (Experimental)
Channel plan IN865-867 is used mostly in India. It has never been tested outside the lab. Feedback is appreciated!
lora set region 5
1
save
ok
get typestr
TCR-xxx/xx/IN865
RU864 (Yanked)
The RU864-870 channel plan is being used in Russia.
Note: The RU864 frequency plan has been removed from the firmware. Russian leaders decided to leave the circle of civilized countries by February 2022 when they started invading Ukraine. We do not want our devices been used in such a country and fully comply with the Swiss trade sanctions against Russia.
SBX Solar Charger Module
TCR-SLE and TCR-SLI are equipped with an MPPT solar charger and a temperature-controlled battery pack. See also our guide to choosing the right solar kit

Operation
The charger module supplies power to the radar main board and charges the internal battery during periods of sunlight. When the battery is fully charged, the TCR can operate for up to 4 days without sunlight.
Deep discharge protection
Built-in NiMH batteries should not be discharged below 1.1V per cell. To prevent damage to the NiMH cells, the unit will stop operating if the voltage drops below 6.6V.
Note: We recommend charging the battery using the supplied USB adapter when the device is not in use (not exposed to sunlight).
Low temperature protection
Our battery packs are equipped with a heating foil to temper the NiMH cells before charging. This prolongs the life of the battery pack but may result in slower charging on freezing days.
Reset Press and hold the red button for up to 30 seconds to reset the solar charger. Power to the radar main board will be interrupted and switched on after 5-10s.
LED Visualization
Operation states and errors of the solar charger are indicated by 3 LEDs. Pressing the red button switches on Battery LED and Error LED for some time while the Solar LED is directly controlled by the power input.
| Battery LED | Meaning |
|---|---|
| Off | Battery is very low or there is an error |
| Blinking slowly | Battery SOC is between 1% and 99%. Radar is enabled. |
| On | Battery is fully charged (100%). Radar is enabled. |
| Error LED | Meaning |
|---|---|
| Off | No Error |
| 1 pulse followed by a longer pause | Battery not connected |
| 2 pulses followed by a longer pause | Battery is too cold for charging. Solar energy will be used for heater |
| 3 pulses followed by a longer pause | Battery is too hot. Charging is interrupted to cool down the battery cells |
| 4 pulses followed by a longer pause | Battery voltage too low or initial charging is active. |
| Charging LED | Meaning |
|---|---|
| Off | No power input or cable disconnected |
| On | Power source detected but too less power to start charging. |
| Blinking slowly | Charging active |
Troubleshooting
See our FAQ Section for common questions.
Disclaimer
ALL PRODUCT, PRODUCT SPECIFICATIONS AND DATA ARE SUBJECT TO CHANGE WITHOUT NOTICE TO IMPROVE RELIABILITY, FUNCTION OR DESIGN OR OTHERWISE.
PMY Systems AG, its affiliates, agents, and employees, and all persons acting on its or their behalf (collectively, "PMX"), disclaim any and all liability for any errors, inaccuracies or incompleteness contained in any datasheet or in any other disclosure relating to any product.
PMX makes no warranty, representation or guarantee regarding the suitability of the products for any particular purpose or the continuing production of any product. To the maximum extent permitted by applicable law, PMX disclaims (i) any and all liability arising out of the application or use of any product, (ii) any and all liability, including without limitation special, consequential or incidental damages, and (iii) any and all implied warranties, including warranties of fitness for particular purpose, non-infringement and merchantability.
Statements regarding the suitability of products for certain types of applications are based on PMX's knowledge of typical requirements that are often placed on Paramtric products in generic applications. Such statements are not binding statements about the suitability of products for a particular application. It is the customer's responsibility to validate that a particular product with the properties described in the product specification is suitable for use in a particular application. Parameters provided in datasheets and / or specifications may vary in different applications and performance may vary over time. All operating parameters, including typical parameters, must be validated for each customer application by the customer's technical experts. Product specifications do not expand or otherwise modify Paramtric's terms and conditions of purchase, including but not limited to the warranty expressed therein.
Hyperlinks may direct users to third-party websites. These links are provided as a convenience and for informational purposes only. Inclusion of these hyperlinks does not constitute an endorsement or an approval by PMX of any of the products, services or opinions of the corporation, organization or individual associated with the third-party website. PMX disclaims any and all liability and bears no responsibility for the accuracy, legality or content of the third-party website or for that of subsequent links.
Except as expressly indicated in writing, PMX products are not designed for use in medical, life-saving, or life-sustaining applications or for any other application in which the failure of the PMX product could result in personal injury or death. Customers using or selling PMX products not expressly indicated for use in such applications do so at their own risk. Please contact authorized PMX personnel to obtain written terms and conditions regarding products designed for such applications.
No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted by this document or by any conduct of PMX. Product names and markings noted herein may be trademarks of their respective owners